НёЬьЮЊДѓМвНщЩмвЛЯТОЕфПижЦЫуЗЈжЎвЛЕФPIDПижЦЗНЗЈЁЃPIDПижЦЗНЗЈДгЬсГіжСНёвбгаАйгрФъРњЪЗЃЌЦфгЩгкНсЙЙМђЕЅЁЂвзгкЪЕЯжЁЂТГАєадКУЁЂПЩППадИпЕШЬиЕуЃЌдкЛњЕчЁЂвБН№ЁЂЛњаЕЁЂЛЏЙЄЕШаавЕжагІгУЙуЗКЁЃ
дкДѓбЇЦкМфЃЌВЮМгЕФжЧФмЦћГЕОКШќжаОЭЪЙгУЕНСЫPIDОЕфПижЦЫуЗЈЃЌЖдгкжЧФмаЁГЕЕФЕїЪдИќМгЕФЗНБуЁЃ
вЛЁЂPIDдРэ
PIDПижЦЗНЗЈНЋЦЋВюЕФБШР§ЃЈproportionalЃЉЁЂЛ§ЗжЃЈintegralЃЉЁЂЮЂЗжЃЈderivativeЃЉЭЈЙ§ЯпадзщКЯЙЙГЩПижЦСПЃЌЖдБЛПиЖдЯѓНјааПижЦЁЃ
ГЃЙцЕФPIDПижЦЯЕЭГШчЭМЫљЪОЃК
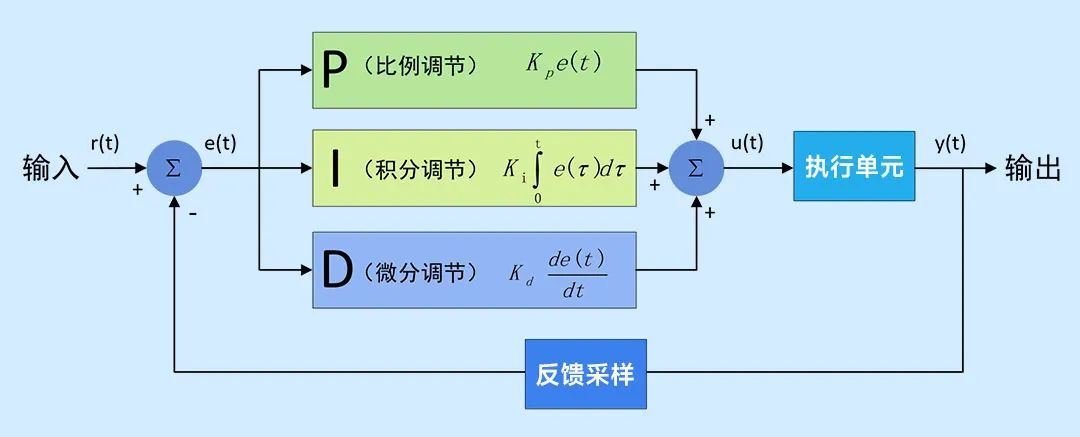
ЯЕЭГЕФЪфШыr(t)ЮЊПижЦСПЕФФПБъЪфГіжЕЃЌЪфГіy(t)ЮЊПижЦСПЕФЪЕМЪЪфГіжЕЃЌe(t)ЮЊЪфГіСПФПБъжЕгыЪЕМЪжЕЕФЦЋВюСПЃЌPIDЫуЗЈЕФЕїПиЪЧЛљгкe(t)НјааЕФЁЃ
БШР§ЕїНкЪЧЛљгкЪЕМЪжЕгыФПБъжЕЕФЦЋВюСПНјааЯпадЕїНкЃЌ дкЯЕЭГжаБэЯжЮЊKpe(t)ЃЌKpЮЊБШР§дівцЁЃ
БШР§дівцKpдНДѓЕїНкзїгУдНМЄНјЃЌЪфШыЪфГіЕФЮЂаЁЦЋВюЖМЛсдьГЩКмДѓЕФЕїНкЖЏзїЃЛЯрЗДЕФKpдНаЁЕїНкзїгУдНБЃЪиЃЌМДЪЙЪфШыЪфГіВювьКмДѓЯЕЭГЕФЕїНкаЇЙћЖМВЛЬЋУїЯдЁЃ
Л§ЗжЕїНкЪЧРћгУРњЪЗЦЋВюСПЕФРлМЦЖдЯЕЭГЪфГіНјааЕїНкЃЌдкЯЕЭГжжБэЪОЮЊ:

Л§ЗжЕїНкЕФвтвхЪЧЯћГ§ЯЕЭГЕФЮШЬЌЮѓВюЁЃЛ§ЗждівцKiдНДѓЯЕЭГЕФЮШЬЌЮѓВюЯћГ§ЕФдНПьЃЌKiдНаЁЯЕЭГЕФЮШЬЌЮѓВюдНВЛвзЯћГ§ЃЌЯЕЭГЕФЕїНкОЋЖШдНВюЁЃЕЋЪЧKiЙ§ДѓЛсдкЯьгІЙ§ГЬВњЩњНЯДѓГЌЕїЃЌЕМжТЛ§ЗжБЅКЭЯжЯѓЕФВњЩњЁЃ
ЮЂЗжЕїНкЪЧЛљгкЦЋВюСПЕФБфЛЏЫйТЪЃЈЦЋВюЧѓЕМЃЉЖдЯЕЭГЪфГіНјааЕїНкЃЌдкЯЕЭГжжБэЪОЮЊ:

ЮЂЗжЕїНкжївЊЦ№ЕНзшФсЕФзїгУЃЌвжжЦГЌЕїЁЃЮЂЗждівцKdдНДѓЃЌЯЕЭГЕФЮШЖЈаддНКУЃЌЕїНкЙ§ГЬжаЧњЯпВЈЖЏдНаЁЁЃЕЋЪЧKdШєЩшжУЙ§ДѓЛсЪЙЕУЯЕЭГЕФЕїНкЪБМфдіГЄЃЌПЙИЩШХадМѕШѕЁЃ
ЦЋВюжЕдкОЙ§Ш§жжЕїНкзїгУКѓЛсВњЩњвЛИіПижЦСПu(t)ЃЌu(t)НЋЭЈЙ§жДааЕЅдЊПижЦЪфГіЁЃЯЕЭГНЋРћгУВЩбљЕЅдЊНЋЪфГіЗДРЁИјЪфШыЖЫНјааЦЋВюСПМЦЫуЁЃ
ГЃЙцPIDПижЦЯЕЭГжаu(t)гыe(t)жЎМфЕФКЏЪ§ЙиЯЕШчЯТЃК

ЗжБ№ЕїНкKpЁЂKiЁЂKdВЮЪ§ЖдPIDПижЦЯЕЭГадФмЕФгАЯьШчЯТБэЫљЪОЃК

ЖўЁЂЪ§зжPIDПижЦ
ЫцзХМЦЫуЛњММЪѕЗЂеЙЃЌФПЧАЖрвдЮЂПижЦЦїЛђМЦЫуЛњЮЊдЫЫуКЫаФЃЌРћгУШэМўГЬађРДЪЕЯжPIDПижЦКЭаЃе§ЃЌвВОЭЪЧЪ§зжPIDПижЦЁЃГЃгУЕФЪ§зжPIDПижЦЗНЗЈгаЃКЮЛжУЪНPIDЁЂдіСПЪНPIDвдМАВННјЪНPIDЕШЁЃ
01
ЮЛжУЪНPID
гЩгкМЦЫуЛњЕФдЫЫуЪЧРыЩЂЕФЃЌвЊЯыЪЕЯжЪ§зжPIDПижЦЪзЯШашвЊНЋСЌајКЏЪ§НјааРыЩЂЛЏЁЃ
ЮвУЧгУЮѓВюЕФРлМгЬцДњЛ§ЗждЫЫуЃЌгУЮѓВюЕФВюЗжДњЬцЮЂЗждЫЫуЃЌПЩЕУЃК

ЦфжаkЮЊВЩбљађСаКХ(k=0,1,2,3......)ЃЌe(k)ЮЊЕкkДЮВЩбљЪБЕФЮѓВюжЕЃЌe(k-1)ЮЊЕкk-1ДЮВЩбљЪБЕФЮѓВюжЕu(k)ЮЊЕкkДЮВЩбљЪБПижЦСПЕФЪфГіжЕЁЃдкЮЛжУЪНPIDжаЪфГіu(k)жБНгПижЦД§ПижЦЖдЯѓЃЌu(k)ЕФжЕКЭПижЦЖдЯѓЪЧвЛвЛЖдгІЕФЙиЯЕЁЃ
ДгЪН2ПЩвдПДГіЃЌЮЛжУЪНPIDашвЊМЦЫуЕкkДЮКЭk-1ДЮЕФЮѓВюЃЌПижЦЦїЛсЖдЦЋВюНјааРлМгЃЌетбљЛсЪЙЕУЯЕЭГЕФдЫЫуСПБфДѓЃЌеМгУФкДцЙ§ЖрЃЌИјМЦЫуЛњДјРДИКЕЃЁЃ
ЭЌЪБЃЌПижЦЦїЕФУПДЮЪфГіu(k)ЖМКЭЙ§ШЅЕФзДЬЌгаЙиЃЌu(k)ЕФДѓЗљБфЛЏЛсЕМжТжДааЛњЙЙЕФзДЬЌДѓЗљБфЛЏЃЌЯЕЭГПЙИЩШХФмСІВюЁЃ
ЮЊСЫИФЩЦетаЉЮЪЬтЃЌгабЇепЬсГіСЫЪ§зжPIDЕФСэЭтвЛжжЪЕЯжЗНЗЈЁЊЁЊдіСПЪНPIDЁЃ
02
діСПЪНPID
діСПЪНPIDЕФЪфГіЪЧЖдБЛПиЖдЯѓЕФдіСП?u(k)ЃЌЖјВЛЪЧЪЕМЪЕФПижЦСПДѓаЁЁЃ

Цфжаa0=kp+ki+kd, a?=-Kp-2kd,a?=kdЁЃ
ДгЩЯЪНПЩвдПДГідіСПЪНPIDИњkЪБПЬЁЂk-1ЪБПЬЁЂk-2ЪБПЬЕФЦЋВюЖМгаЙиЯЕЃЌЕЋЪЧВЛЛсЖдЦЋВюНјааРлЛ§ЃЌЫљвдЯрБШЮЛжУЪНPIDЕФМЦЫуСПвЊаЁЃЌвВВЛЛсИњЙ§ШЅЕФЦЋВюгаЙиСЊЃЌЫљвдПижЦЯЕЭГЕФЮШЖЈадКУЁЃ
03
ВННјЪНPID
ЕБPIDЯЕЭГЕФЩшЖЈжЕЗЂЩњНЯДѓЕФЭЛБфЪБЃЌЯЕЭГКмШнвзВњЩњГЌЕїЃЌгАЯьЦфЮШЖЈадЁЃЮЊСЫБмУтНздОаХКХДјРДЕФВЛРћгАЯьЃЌгабЇепЬсГіСЫВННјЪНPIDЁЃ
ВННјЪНPIDВЛЖдНздОаХКХНјаажБНгЯьгІЃЌЖјЪЧАДееЩшЖЈЕФВННјЙцдђж№НЅдіМгЩшЖЈжЕЃЌЪЙЕУаХКХж№ВНППНќФПБъжЕЃЌетбљБЛПиЖдЯѓдЫааЦНЮШЃЌБмУтСЫвђЭЛБфДјРДЕФГЌЕїЁЃ
етжжЗНЗЈВЂЮДИФБфPIDЫуЗЈНсЙЙБОЩэЃЌЖјЪЧЖдЩшЖЈжЕНјааВННјДІРэЃЌЪЙЦфВЛВњЩњЭЛБфЁЃВННјДІРэЗНЗЈгаКмЖржжЃЌзюЮЊГЃМћЕФЪЧНЈСЂвЛИіЯпадБфЛЏКЏЪ§ЃЌШЗЖЈБфЛЏВНГЄЃЌЕБМьВтЕНФПБъжЕЗЂЩњБфЛЏКѓАДееВНГЄж№ВНЕїећЩшЖЈжЕЁЃ
Ys=Yn+kT
ЦфжаYsЮЊЩшЖЈФПБъжЕЃЌYnЮЊЕБЧАФПБъжЕЃЌTЮЊВНГЄЃЌkЮЊБфЛЏЯЕЪ§ЁЃЕБМьВтЕНФПБъжЕдіМгЪБk=1ЃЌЕБФПБъжЕВЛБфЪБk=0ЃЌЕБФПБъжЕМѕаЁЪБk=-1ЁЃ
ВННјЪНPIDЫфШЛПЩвдМѕЩйНздОаХКХДјРДЕФИЩШХЃЌЕЋЪЧвВЛсШУЯЕЭГЕФЯьгІЫйЖШБфТ§ЃЌПЩвдЕїНкВНГЄРДЦНКтСНепжЎМфЕФЙиЯЕЁЃВНГЄдНаЁдЫаадНЮШЖЈЃЌЯЕЭГЯьгІЫйЖШдНТ§ЃЌЗДжЎврШЛЁЃ
Ш§ЁЂPIDЫуЗЈгХЛЏ
01
Л§ЗжБЅКЭгХЛЏДІРэ
ШєЯЕЭГГжајДцдквЛИіЗНЯђЕФЦЋВюЪБЃЌPIDПижЦЦїЕФЪфГігЩгкЛ§ЗжзїгУВЛЖЯРлМгЖјдіДѓЃЌДгЖјЕМжТПижЦЦїЪфГіВњЩњГЌЕїНјШыБЅКЭЧјЁЃ
ЕБЯЕЭГГіЯжЗДЯђЦЋВюЪБЃЌгЩгкЪфГіБЅКЭЖјВЛФмЖдЗДЯђЕФЦЋВюНјааПьЫйЯьгІЃЌетжжЯжЯѓГЦЮЊЛ§ЗжБЅКЭЁЃ

ГЃгУвжжЦPIDЛ§ЗжБЅКЭЗНЗЈгаЃК Л§ЗжЗжРыЗЈЁЂгіЯоЯїШѕЛ§ЗжЗЈвдМАБфЫйЛ§ЗжЗЈЕШЁЃ
//Л§ЗжЗжРыЗЈ
ЕБЯЕЭГМьВтЕНЦЋВюe(k)НЯДѓЪБЃЌШЁЯћЛ§ЗжЛЗНкЃЌЕББЛПиСПНгНќИјЖЈжЕЪБЃЌЮѓВюМѕаЁЃЌДЫЪБЛжИДЛ§ЗжЛЗНкЁЃетбљМШВЛгАЯьПижЦЦїЕФЖЏЬЌадФмЃЌгжФмБмУтГіЯжбЯжиГЌЕїЛђГжајеёЕДЯжЯѓЁЃ
//БфЫйЛ§ЗжЗЈ
ИљОнЯЕЭГЕФЦЋВюe(k)ДѓаЁЖдЛ§ЗжЫйЖШНјааЕїећЃЌЕБe(k)ОјЖджЕКмДѓЪБМѕТ§Л§ЗжЫйЖШЃЌЕБe(k)ОјЖджЕКмаЁЪБМгПьЛ§ЗжЫйЖШЁЃдкЛ§ЗжБЅКЭЪБМѕаЁЛ§ЗжЪБМфПЩвдДяЕНвжжЦЛ§ЗжБЅКЭЕФаЇЙћЃЌдіЧПЯЕЭГЕФЪЪгІадЁЃ
//гіЯоЯїШѕЛ§ЗжЗЈЃК
ЕБМьВтЕНПижЦСПu(k)НјШыБЅКЭЧјЪБВЛдйНјааЛ§ЗжЯюРлМгЃЌЖјжДааЯїШѕЛ§ЗжЕФдЫЫуЁЃетбљВЛЛсВњЩњЙ§ЖрЕФГЌЕїСПЃЌЕБашвЊЗДЯђЕїНкЪБФмНЯПьЕиЯьгІЃЌБмУтЪфГіГЄЪБМфЭЃСєдкБЅКЭЧјЁЃ
02
ЮЂЗжЯюгХЛЏДІРэ
PIDЫуЗЈжаЮЂЗжЯюгыЦЋВюЕФБфЛЏЫйТЪгаЙиЁЃШчЙћЯЕЭГДцдкЦЕТЪНЯИпЕФИЩШХЛђЭЛБфЕШЧщПіЪБЃЌЮЂЗжЯюЕФЪ§жЕЛсВЛЖЯЬјБфЃЌЪЙПижЦЙ§ГЬВњЩњЯЕЭГеёЕДЃЌгАЯьПижЦЯЕЭГЕФЮШЖЈадЁЃ

ГЃгУЕФЮЂЗжЛЗНкгХЛЏЗНЗЈШчЯТЃК
//ЮЂЗжЯШаа ЃК
ЮЂЗжЯюЖдВтСПжЕВњЩњЕФЦЋВюЦ№зїгУЃЌЖјВЛЪЧЖдЩшЖЈжЕЦ№зїгУЁЃетбљПЩвдБмУтЩшЖЈжЕЕФБфЛЏЖјВњЩњНЯДѓЕФЕїНкВЈЖЏЃЌвжжЦИпЦЕИЩШХв§Ц№ЕФЯЕЭГеёЕДЁЃ
//ВЛЭъШЋЮЂЗж ЃК
ВЛЭъШЋЮЂЗжЪЧдкЮЂЗжзїгУКѓв§ШывЛНзЙпадЛЗНкЃЌЪЙЕУдкЦЋВюзїНздОЪНБфЛЏЪБВњЩњЕФЮЂЗжЕїНкСПЃЌвдвЛжжНЯЮЊЦНЛКЕФЗНЪНЪфГіЁЃетбљдкВЛМѕаЁЮЂЗжЕїНкзїгУЕФЧАЬсЯТЃЌНЕЕЭвђЮЊЦЋВюЭЛБфВњЩњЕФВЈЖЏЁЃ
//ЪмПиЮЂЗжЗЈ ЃК
ЪмПиСПЮЂЗжPIDЫуЗЈЪЧЖдПижЦЦїЕФЪфГіжЕНјааЮЂЗжЃЌЖјВЛЪЧЖдЯЕЭГЯьгІЕФЪЕМЪЪфГіжЕНјааЮЂЗжЃЌПЩБмУтгЩгкЯЕЭГЩшЖЈжЕЦЕЗББфЛЏЛђжДааЦїЕФеёЕДВњЩњЕФЯЕЭГЯьгІГЌЕїСПЙ§ДѓЁЃ
03
ДЎМЖPID
ЫљЮНДЎМЖPIDЃЌОЭЪЧВЩгУЖрИіPIDПижЦЦїДЎСЊЙЄзїЃЌЭтЛЗПижЦЦїЕФЪфГізїЮЊФкЛЗПижЦЦїЕФЩшЖЈжЕЃЌгЩФкЛЗПижЦЦїЕФЪфГіШЅВйзнЭтЛЗПижЦЦїЃЌДгЖјЪЕЯжЭтЛЗБЛПиСПЕФПижЦаЇЙћЁЃДЎМЖPIDФмЙЛгааЇИФЩЦПижЦжЪСПЃЌдкЙ§ГЬПижЦжагІгУЙуЗКЁЃ
ПижЦЯЕЭГвдЭтЛЗПижЦЦїЮЊжїЕМЃЌБЃжЄЭтЛЗжїБфСПЮШЖЈЮЊФПЕФЃЌСНИіПижЦЦїаЕївЛжТЃЌЛЅЯрХфКЯЁЃЭтЛЗПижЦЦїАДИККЩКЭВйзїЬѕМўЕФБфЛЏВЛЖЯОРе§ФкЛЗПижЦЦїЕФЩшЖЈжЕЃЌЪЙФкЛЗПижЦЦїЕФЩшЖЈжЕЪЪгІИККЩКЭВйзїЬѕМўЕФБфЛЏЁЃ
дкЕчЛњПижЦжаДЎМЖPIDЪЎЗжГЃМћЃЌГЃгУЕФЮЛжУЛЗ+ЫйЖШЛЗ+ЕчСїЛЗПижЦНсЙЙШчЭМЁЃ

дкPIDПижЦЗНЗЈжаPЁЂIЁЂDЪЧШ§жжВЛЭЌЕФЕїНкзїгУЃЌдкЪЕМЪгІгУЪБПЩИљОнашЧѓЖдШ§жжЕїНкзїгУНјааСщЛюзщКЯЃЌетвВЪЧPIDПижЦЗНЗЈЕФїШСІЫљдкЃЌЫќЕФНсЙЙОіЖЈСЫЫќдкЪЕМЪгІгУжаЕФЖрбљадгыСщЛюадЁЃ
БОЦЊжївЊДгPIDдРэЁЂЪ§зжPIDЪЕЯжЗНЪНвдМАЫуЗЈгХЛЏЗНУцНјааСЫМђЕЅНщЩмЃЌЯЃЭћФмЙЛЖдДѓМвбЇЯАPIDЫуЗЈгаЫљАяжњЁЃ
